Robotics Assignment: Project Design Portfolio
Question
Task:
This assessment task is completed individually and requires students to submit a portfolio containing
specified evidence of undertaking and completing the required project design. A major component
of the portfolio is the final project report which extends upon the Design Proposal to include detail
and discussion of design improvements after prototyping and receiving feedback in the group
presentations, and on the final project outcome. The report will also include a discussion of
professional ethics and sustainability relating to the completed project design, and how undertaking
the laboratory experiences influenced the final design. The portfolio needs to include a video of the
completed project. An element of the portfolio is peer assessment of the contributions by group
members to the project
The final report needs to include adequate detail on the final design. This a large component
of the portfolio which is the major assessment task for this unit and as such should have the
following sections:
Group Members
Final Design (1500 words) – The final design should take into account the
experience in building the robot, and while you can work in your groups to realise
the final design, it is the opportunity to refine the design individually if you wish. An
important part of this section are the justifications as to why certain design
considerations were made for the final design. As discussed we understand that this
unit is most student’s first exposure to electrical systems and while a good solution
helped your marks for the Design Proposal, here we are concerned with what you
have learnt and is the opportunity to improve your final design. Your final design
does not need to be the one presented in the group presentation, however there
needs to be an explanation of how the design and any feedback has helped
contribute to the final submitted design in the final report.
The final design should take into account any feedback, experienced gained through
prototyping or group presentation. Even if you have decided not to take this on
board, you should reflect on the feedback and experiences and justify why you have
or have not decided to take this on board to improve your design.
The final report should include diagrams, circuit diagrams, graphs, tables as
appropriate. It should include a discussion on the design presented in week 9 and
the final design, but not the whole design presented in the design proposal as that is
already included as a separate portfolio item. You can however reference the design
proposal from within the final report. The final report should include justification as
to why the particular final design was chosen (even if that is the one from week 9),
and what impact the feedback from the presentation in week 9 had on the final
design. It should include necessary calculations as why the particular circuit was
chosen for the final design and how it will work.
There needs to be discussion on how undertaking the laboratory sessions influenced
the final design.
Reflection – The reflection needs to discuss your experience in the (a) group-based activities leading up to Week 9, (b) prototyping activities, and (c) group presentation, and how these have contributed to your final design. The reflection on prototyping activities needs to include discussion of design improvements after prototyping and receiving feedback after the group presentation.
Professional Practice – This needs to discuss how your final design could be improved to, or how it does, address ethical and sustainability considerations likely to be expected of you as an Electrical and Electronics/Mechatronics Engineer. The discussion on sustainability should mention why/why not a renewable energy source should be included in your final design.
Peer Assessment – Include the table below for your peer assessment. There should be a section for each group member. You do not need to assess yourself.
The final report should be between approximately 2000 words long.
Answer
Proposed design
Description of the problem:
Sensing the presence of the obstacle: This illustrates in this Robotics assignment that the robot should be capable enough to sense any obstacle which is placed in its path. This includes some of the cases which are listed below (Kappassov, Corrales, and Perdereau, 2015)
Case 1: The diagram below shows that the robot is capable enough to sense the obstacle which is placed forefront of it with the help of sensor 1 (Koga, 2018). The robot is sensing the obstacle which is represented by the black line which is placed across the sensor 1.
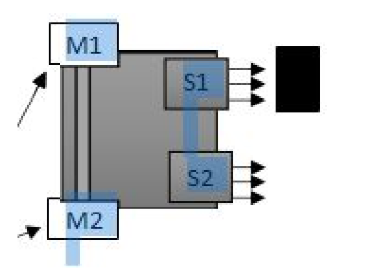
Fig 1
Case 2: The second case demonstrates that the robot is sensing the obstacle with the help of sensor 2 as the obstacle lies at the frontline of sensor 2 (Kikkeri, and Thibodeau, 2016).
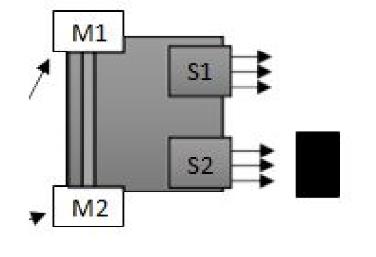
Fig 2
Analysis of the reaction of the robot after the percieveion of the obstacle
The two cases provided in this Robotics assignment show that the robots will only move backwards when it perceives the obstacles in its path. If none of the obstacles are percieveed in its path, then the robot will not change its position. The robot will keep on moving towards the back until it stops the percieveion of the obstacle in its path (Jin et al. 2016). In case 1, the figure shows that the obstacle lies at the front line of the sensor thus, the robot will move in such a manner such that both sensor 1 and sensor 2 will percieve the obstacle that lie in the path. The robot should turn backwards as if the it moves in the forward direction; it might strike with the obstacle. In the second case, as shown in the figure 2 the obstacle lies at the front of sensor 2 thus, the robot should turn in such a way so that both the sensor percieve the obstacle in the path (Tietze et al. 2015). even for this case, the robot should turn in a backward direction since if the robot moves in the forward direction, it can strike with the obstacle which is placed at the path. after successful percieveion of the obstacle by both the sensors the robot should move backwards in accordance with the point 1.
Power circuit requirements for the robot
Certain essential circuit components are required for efficient working of the robot. The essential components are listed below
- A dc voltage source
- Motors
- Sensors for percieve of obstacle
- Infra-Red LED
Explanation of the components used in the circuit
Power source: This is basically a battery which act as a source of power for the robot to work
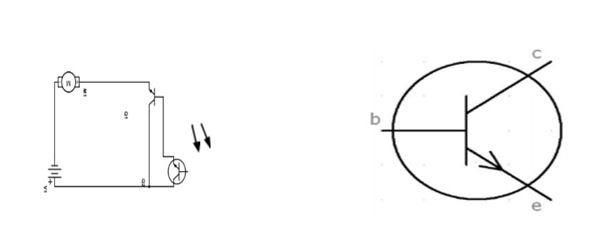
Transistor: This is a component which can serve as a switch or an amplifier. Its main function is to convert the electronic signal and the controlling electric circuitry. This consist of a Base, Emitter and Collector. In this particular component, the transistor is being used as an amplifier which aims at amplifying the current to the motor in the circuit (Zebulum et.al 2018).
Working principle of transistor in the above circuit: Transistor as stated above comprise of three parts namely Emitter, Base and Collector. Base is referred as the gate controlling part for the supply of large electricity. Collector is the larger supply and the emitter is the outlet for the supply. In absence of current in the base, it does not permit any flow of current from collector to the emitter. The little amount of current which exists in the base can create large flow of current between the emitter and collector.
Infrared LED: This electronic component is a distinct type of diode which infrared rays through the conversion of electrical energy to light energy.
Phototransistor: This is a component which is capable enough to detect the different level of light and lets flow of current efficiently in the emitter and collector depending on the intensity of light (Pecht, 2018).
Working principle: This is basically a kind of transistor where the photons (smallest unit of light particles) from the light when hits the base of the transistor, current flows from the collector to the emitter (Baker, 2019).
Variable resistor: This component helps in resisting the flow of current in the circuit and in the project, variable resistor has been used for protecting the Infrared LED from high voltages.
Problem 1: Describe the process involved for the robot while sensing the obstacle
Solution: Infrared LED and Photoresistor: IR rays will be release by the IR LED towards the obstacle and the rays will later hit back after bouncing and striking the photoresistor. The photoresistor will them permit the flow of current through the circuit resulting the movement of the robots in the backward direction. The figure depicts that there is no obstacle in the path of the robot and hence, no current will go as no obstacle is perceived by the infrared light (Yuan, Srinivasan, and Adelson, 2016).
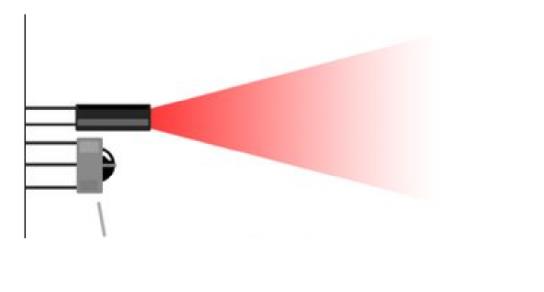
Fig 3
The figure provided in this Robotics assignment depicts designed circuit for IR sensor and demonstrates that when the rays are released from the IR LED, it bounces back and strikes the photoresistor which lets the current to pass to through the circuit and results in the backward movement of the robot.
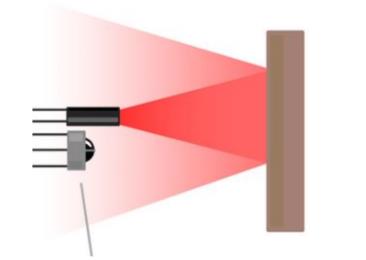
Fig 4
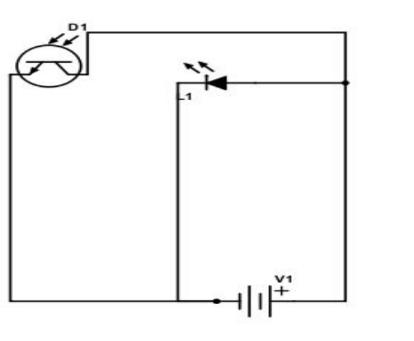
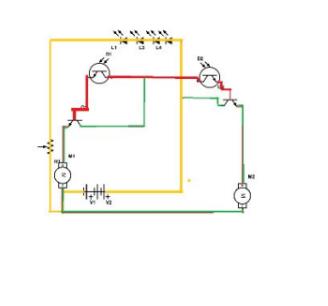
Fig 5: Designed circuit for the robot
Problem 2: State the reaction of the robot after the percieveion of the obstacle
Solution: In case 1of Robotics assignment, fig 6, there are two sensors namely sensor S1 and sensor S2 and two motors Motor (M1) and (M2). It is evident from the figure 6 below the obstacle is placed forefront of the sensor 1 which would activate the first motor because of their connection. Thus, the robot will start moving towards the left with the motor (M1). The second motor is still and the make the robot turn left (Frank et al. 2016).
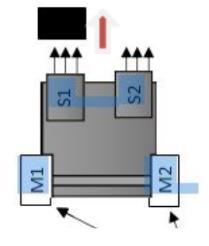
Fig 6
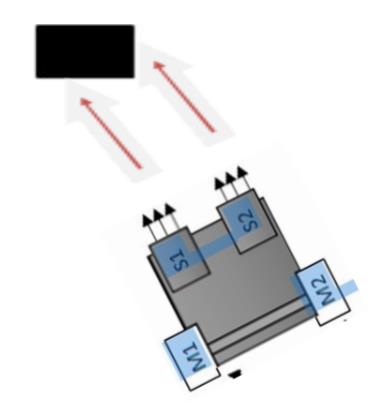
Fig 7
The figure 7 provided in this Robotics assignment shows that the motor 1 will move backwards and due to this, the sensor 2 will become active along with second motor. This would eventually lead in the backward movement o the robot.
In case 2, fig 8, when the obstacle is forefront of the second sensor and will become active the second motor as they are linked, and the current robot will keep turning towards the right though the first motor. In this case, first motor is still and second motor will move in back position.
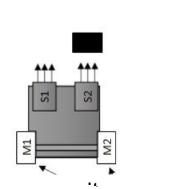
Fig 8
The figure 9 shows that the second motor will move backwards which results in the activation of sensor 1 and first motor that makes the robot move backwards.
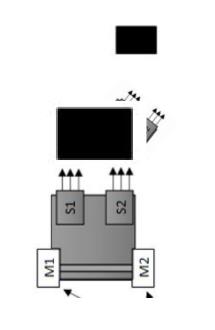
Fig 9
In figure 10 the obstacle is placed in such a way that it becomes easy for both the sensors to percieve the obstacle which lies forefront and would eventually activate the first motor and second motor resulting in the backward movement of the robot.
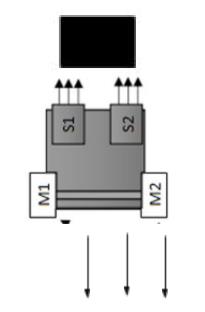
Fig 10
Problem 3: State the method for the amplification of current with the help of motor within this Robotics assignment
Solution: Implementing transistor
Working principle: the base of the transistor is connected to the photo transistor which means when the light falls on it, current will flow from phototransistor to the base and eventually initiate to start the flow from current from collector to emitter (Bimbo et al. 2016).
Circuit diagram: Here, L1, L2, L3, and L4 are the IR LED which are in series connection with variable resistor R1 in connection with the battery. The positive terminal of power source mentioned in this Robotics assignment is connected with collector of phototransistor and also with the amplifier. Emitter is connected to the negative terminal of the voltage source through the motor and from the phototransistor it is connected to the base of the transistor (Park, 2016).
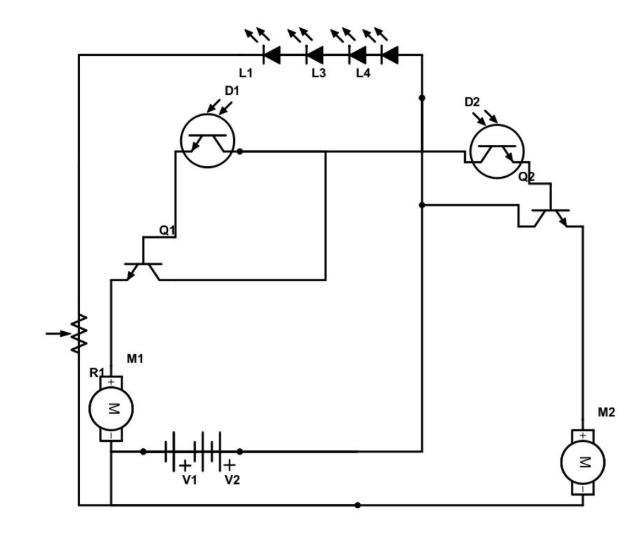
Working principle of the circuit: The current will flow from IR LED and the variable resistor and the yellow line in the figure shows the flow of current in the circuit which would light up the LED. The LED will then start releaseting IR rays and if any obstacle lies, it will bounce and strike the phototransistor. The current will then flow from collector to emitter which is represented by red lines due to the Infra-red rays (Fish, 2017).
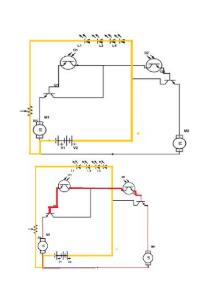
Lastly, the current from the emitter reaches base f the transistor thus, permiting the flow of current from collector to emitter which is represented by green lines.
Ethics and sustainability: The robot can be made eco-friendly by creating the parts of the robots from natural sources rather than plastics. Thus, biodegradability will help in enhancing the quality of the robot. The robots get the suitable energy from the consumption of biomass from the society. The by-product which is released from the robot is CO2 which is also production from the biodegradation of the fuels. The robots are made from biodegradable products so that when their task gets completed, they can be disposed of securely and don’t end up in landfills. Various other benefits of biodegradable robots exist such as they can be sent to remote locations for the collection of data and tap them into useful natural resources for obtaining substantial energy from them. The robots can also be used for cleaning up the areas where human cannot enter.
Reflection
The activity illustrated in this Robotics assignment is based on a project which consists of some motors and sensors, obstacle and a robot. Previously, some of the problems arise such as lack of percieveion of the obstacles by the robot. When the obstacle was placed forefront of sensor 1, it turned backwards and when placed forefront of sensor 2, the robot turned backwards. The design of the project was a bit challenging. The power circuit components were collected by me and I tried to frame out the essential components which will be required in the project. Based on the correct implementation of the components, the robot can move in the correct path and will eventually percieveed the obstacle. For this, the IR sensor was used which helps in the determination of obstacles in the path. this has helped in gaining deep knowledge regarding the application of Infra-red sensors in various projects as well as in real-life. Along with tis I have also learned about the different kinds of transistor which is available in the market and their use. For this, project I have chosen the transistor and a phototransistor. The former serves as an amplifier whereas the alter serves as a diode. While making the circuit, the I kept in mind the various functionalities of the components and have designed the circuit accordingly.
Through this project I have gained immense knowledge regarding the practical uses of the components and its application in real life activities. This project has let me realize the difference between the real-life as well as the theoretical knowledge and experience. Along with this, the problems that I have faced while complete the project have made me understand the value to time and patience. Planning is an essential part for nay project to be completed. The project has taught me the time management skills and have made me familiar with some of the electronic components are their uses. Through this, project I have also become quite independent and it has boosted in me the confidence as well as interest for conducting further projects. It has also permited me to understand the deeper concepts of electronic components and their application in day to day work activities. The knowledge of practicality is important as it has helped me in leading my life in a smarter way.
Moreover, the familiarization with the components can help me developing my knowledge as well as future for future purpose. The design improvement factors discussed in this Robotics assignment are also one of the most challenging tasks that in I have faced whirl doing the project. The implementation of electronic components in the circuit was also challenging. I took the help of internet to understand the concepts and along with this, I have also referred to some journal articles and books. The project which based on the obstacle percieveion by the robot was made of biodegradable matter. The importance of keeping our environment safe is the most important factor which I have kept at the top priority. The robots are made free from any such hazardous material and I believe can do more modification to the given project in future.
Reference List
Baker, R.J., 2019. CMOS: circuit design, layout, and simulation. Wiley-IEEE press.
Bimbo, J., Luo, S., Althoefer, K. and Liu, H., 2016. In-hand obstacle pose estimation using covariance-based tactile to geometry matching. IEEE Robotics and Automation Letters, 1(1), pp.570-577.
Fish, P.J., 2017. Electronic noise and low noise design. Macmillan International Higher Education.
Frank, J.A., Moorhead, M. and Kapila, V., 2016, August. Realizing mixed-reality environments with tablets for intuitive human-robot collaboration for obstacle manipulation tasks. In 2016 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN) (pp. 302-307). IEEE.
Jin, H., Chen, Q., Chen, Z., Hu, Y. and Zhang, J., 2016. Robotics assignment Multi-LeapMotion sensor based demonstration for robotic refine tabletop obstacle manipulation task. CAAI Transactions on Intelligence Technology, 1(1), pp.104-113.
Kappassov, Z., Corrales, J.A. and Perdereau, V., 2015. Tactile sensing in dexterous robot hands. Robotics and Autonomous Systems, 74, pp.195-220.
Kikkeri, H. and Thibodeau, B.J., Microsoft Technology Licensing LLC, 2016. Controlling a robot in the presence of a moving obstacle. U.S. Patent 9,452,531.
Koga, K., FANUC Corp, 2018. Robot system. U.S. Patent Application 10/052,755.
Lyubova, N., Ivaldi, S. and Filliat, D., 2016. From passive to interactive obstacle learning and recognition through self-identification on a humanoid robot. Autonomous Robots, 40(1), pp.33-57.
Park, Y.B., Microsoft Technology Licensing LLC, 2016. Touch quality test robot. U.S. Patent 9,481,084.
Pecht, M., 2018. Handbook of electronic package design. CRC Press.
Tietze, U., Schenk, C. and Gamm, E., 2015. Electronic circuits: handbook for design and application. Springer.
Yuan, W., Srinivasan, M.A. and Adelson, E.H., 2016, October. Estimating obstacle hardness with a gelsight touch sensor. In 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 208-215). IEEE.
Zebulum, R.S., Pacheco, M.A. and Vellasco, M.M.B., 2018. Evolutionary electronics: automatic design of electronic circuits and systems by genetic algorithms. CRC press.